




Three Degrees of Freedom
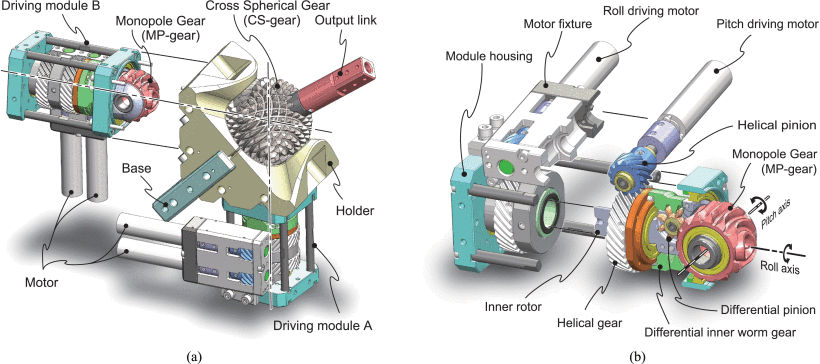
At first glance, they have a similar appearance to one of those spiked dryer balls you use in the laundry, but upon closer inspection, they have a breathtaking geometry that allows for practical applications: they are so-called “ABENICS,” an active ball-joint mechanism with three rotational degrees of freedom (3 RDoF) without slippage based on spherical gear meshings. First presented by Kazuki Abe et al. in IEEE Transactions in Robotics in 2021, the paper says, “The capabilities were inspired by the unique interactions between two different innovative gears [the cross spherical gear (CS-gear) and monopole gear (MP-gear)] and the superimposition of those interactions by the CS-gear’s quadrature spherical tooth structure. One MP-gear constrains two of the three RDoF of the CS-gear. The driving module which drives the MP-gear converts this “constraint” into a “drive” and drives the CS-gear with two RDoF. The CS-gear orthogonally superimposes the interactions caused by two MP-gears to achieve three RDoF driving forces. The principle was revealed by analyzing an equivalent linkage modeled on the mechanism of ABENICS. The linkage also led to the kinematics and torque equations. The theory and physical characteristics of ABENICS were verified in comprehensive and continuous positioning experiments on manufactured prototypes. The flexibility of the actuator placement was also verified in different configurations of the driving modules. The active ball joint, ABENICS can transmit high torque and reliable positioning in three RDoF without an orientation sensor, which applies to robot joints and orientation control mechanisms.”
When imagining the arm of a robot, it conjures an image of a mechanism containing several axes of motion that are each driven by a single motor and gearbox. This works fine for most applications, but in circumstances with spatial constraints, additional volume limits the range of motion. Also, including another degree of freedom requires extending the arm even further and adding more motors. Now imagine a mechanism that works more like a shoulder joint than an elbow, where the output link can rotate in several axes in a much smaller space. Although the strength of this style of joint can be less than a traditional single-axis one, the freedom afforded by this novel design more than makes up for it. Robots can use ABENICS in situations requiring complex and precise movements in small areas, such as food service or manufacturing.
The magic rests within the specially designed spherical gear. While it looks complicated, the gear can be best described as a pair of 2D gears that revolve around the x and y axes, thus giving the appearance of a dryer ball. This allows the central gear to be pitched, rolled, and slid along both drive gear axes. The output link is attached to a single pole on the end of the gear. The drive gears are shaped like the central gear, except they revolve around a single and can rotate in two axes: pitch and roll. To accomplish this, the project’s team placed a bearing through the gear and added a differential pinion to pitch the end up and down. Behind that is a linkage that rotates the entire end when the rear helical gear is spun. A pair of motors are mounted just above the two helical gears in a perpendicular fashion to save space.
A 2022 paper by Frederico Thomas, first presented at the International Symposium on Advances in Robot Kinematics, states, “Kazuki Abe and his collaborators have recently presented an actuated gear-based spherical mechanism called ABENICS. It has received a lot of attention, not only because of its eye-catching motions during operation but also, and mostly, because it can successfully be used when large motion ranges and high stiffness are required. Nevertheless, the main disadvantage of Abe et al.’s design is that it is an over-actuated mechanism: it requires four instead of only three actuators.” Thomas proposes a variation on this mechanism which requires three actuators, thus simplifying its control and potential cost.
Further Reading:

